








News














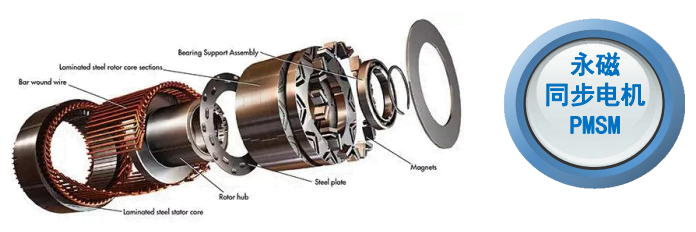



























Как прочитать параметры синхронного мотора с постоянным магнитом?
Как прочитать параметры синхронного мотора с постоянным магнитом?
ПониманиеПараметры синхронного двигателя постоянного магнита (PMSM)является основой отбора, применения, контроля и диагностики неисправностей.
Эти параметры обычно делятся на две категории:
Параметры пластины/Основные параметры производительности: они обычно расположены непосредственно на моторной пластине или в таблице спецификаций производительности Руководства по продукту, которая чаще всего встречается пользователями.
Параметры проектирования/эквивалентные параметры схемы: эти параметры имеют решающее значение для углубленного анализа, точного управления и моделирования моделирования двигателя. Они обычно встречаются в техническом приложении руководства по продукту, проектных документов или требуют тестирования для получения
Ниже подробно объясняются эти два типа параметров:
I. Параметры таблицы / базовые параметры производительности
1. Оценка мощности:
Значение: механическая мощность, которую двигатель может выходить непрерывно, безопасно и надежно и надежно в номинальных условиях (номинальное напряжение, номинальная скорость, номинальная нагрузка, указанные условия охлаждения и т. Д.). Устройство обычно киловатт или мощность.
Просматривается как: это параметр ядра для выбора двигателя для удовлетворения требований нагрузки. Убедитесь, что максимальная непрерывная мощность, требуемая нагрузкой, меньше или равна номинальной мощности двигателя. Обратите внимание на различие между номинальной мощностью и пиковой мощностью (краткосрочная емкость перегрузки)
2. Оцененное напряжение:
Значение: эффективное значение линейного напряжения, указанного во время конструкции, и применяемое к обмотке статора двигателя. Устройство Volt.
Для двигателя, работающего водителем, это обычно относится к эквивалентному значению напряжения шины инвертора DC, преобразованного в сторону переменного тока.
Как просмотреть: должно соответствовать емкости выходного напряжения драйвера. Слишком высокое напряжение повредит изоляции или вызовет магнитное насыщение; Слишком низкое напряжение не сможет выходить с номинальной мощностью и крутящим моментом, деградации производительности.
3. Оценка тока:
Значение: эффективное значение тока тока линии статора из источника питания, когда двигатель выводит номинальную мощность, номинальную скорость и номинальное напряжение. Подразделение Ampere.
Как посмотреть: используется для расчета входной мощности, выберите емкость тока драйвера (номинальный ток драйвера должен быть больше, чем номинальный ток двигателя), разработать линию питания и устройство защиты от перегрузки. Это также косвенно отражает размер потери меди.
Оценка скорости:
Значение: скорость вращения ротора двигателя при номинальном напряжении, номинальная частота и номинальная выходная мощность. Единица - это обороты в минуту.
Он должен соответствовать требованиям скорости нагрузки. Как понять, работает ли двигатель с постоянной скоростью или нет: его нужно отрегулировать, чтобы запустить на скорости. Обратите внимание на разницу между номинальной скоростью и максимальной скоростью (ограниченной механической прочностью и слабой магнитной способностью)
5. Номинальная частота:
Значение: частота источника питания, когда двигатель напрямую питается синусоидальным источником питания (например, сетка). Для двигателей, управляемых частотным преобразователем, этот параметр обычно относится к выходной частоте драйвера на номинальной скорости.
Как просмотреть: для приложений частоты питания он должен соответствовать частоте сетки (50 Гц или 60 Гц). Для приложений с переменной частотой этот параметр напрямую связан с номинальной скоростью (n = 60F /P, где P - количество полюсов).
6. Оцененный крутящий момент:
Механический крутящий момент, генерируемый двигателем, когда он выводит номинальную мощность с номинальной скоростью. Блок: n · m.
Формула: t = p/w, где P - номинальная мощность (ватт), а W - номинальная угловая скорость (Radian/Second, W = 2πn/60, N - номинальная скорость в обороне). Это основной параметр, необходимый для преодоления крутящего момента сопротивления на нагрузке. Обратите внимание на разницу между номинальным крутящим моментом и пиковым крутящим моментом (краткосрочная перегрузка емкости).
7. Эффективность:
Эффективность рейтинга двигателя определяется как процентное соотношение выходной механической мощности к входной электрической мощности (PIN = √3 * V, где V, где V-номинальное напряжение для трехфазных систем). Формула n = (p_out / p_in) × 100% указывает на его способность преобразовать электрическую энергию в механическую мощность. Более высокая эффективность снижает потери энергии (включая потери меди, потери железа, механические потери и потери утечки) при снижении эксплуатационных затрат. Обратите внимание, что эффективность, отображаемая на табличках двигателей, обычно отражает только номинальное состояние.
8. Коэффициент мощности:
Значение: соотношение входной активной мощности к кажущейся мощности (COSφ) при номинальных условиях труда. Он отражает фазовую связь между формой волны тока и напряжения и степенью искажения тока.
Как посмотреть на это: высокий коэффициент мощности означает высокий уровень использования сетки и меньше «загрязнения» для сетки. PMSM обычно имеет высокий коэффициент мощности (около 1) в номинальных условиях. Сам драйвер (инвертор) также влияет на коэффициент мощности на входной стороне.
9. Частота:
Значение: общее количество магнитных полюсов (N и S полюса появляются в парах) магнитного поля двигателя. Количество полюсов обычно указывается на табличке фирменной.
Просмотр: определяет взаимосвязь между синхронной скоростью двигателя и частотой питания (N Sync = 60F/P). Больше полюсов приводит к более низкой синхронной скорости, но потенциально более высокой плотности крутящего момента. Параметры, влияющие на алгоритмы управления (например, пропускная способность наблюдателя)
10. Изоляционная класс:
Значение: указан максимальная рабочая температура изоляционного материала моторной обмотки. Общие оценки - B (130 ° C), F (155 ° C), H (180 ° C).
Как смотреть: определяет допустимый повышение температуры и перегрузку моторного мотора. В высокотемпературной среде или приложениях, требующих высокой перегрузки, безопаснее и надежнее выбрать двигатель с более высокой изоляцией (например, F или H).
11. Защитный класс:
Значение: IP -код указывает на способность корпуса двигателя предотвращать вход солидных посторонних веществ (первая цифра) и жидкости (вторая цифра). Например, IP54 (пыльно-гидроизоляционный и водонепроницаемый), IP65 (пыльно-защищенная и водостойкая), IP67 (пыльно-протешенное и кратковременное погружение).
Как смотреть: выберите в соответствии с пылью, влажностью и влажными условиями среды моторной установки. Наружные, влажные и пыльные среды требуют высокой защиты класса (например, IP65 или выше)
12. Режим охлаждения:
Значение: путь рассеяния моторного тепла. Обычными являются I0 411 (охлаждение самостоятельного вентилятора, рассеяние поверхности), I0 416 (принудительное воздушное охлаждение, внешний вентилятор), I0 410 (естественное охлаждение, без вентилятора), IC71W (водяное охлаждение).
Как смотреть: это влияет на плотность мощности и непрерывную эксплуатационную емкость двигателя. Высокая мощность или компактные двигатели часто принуждают к воздушному охлаждению или охлаждению воды
II Параметры проектирования/эквивалентные параметры схемы
Эти параметры обычно используются для установления математической модели двигателя (модель оси DQ) для управления вектором, моделирования, оптимизации эффективности и прогнозирования производительности.
1. Сопротивление статора:
Значение: значение сопротивления каждой фазы обмотки статора при постоянном токе или низкой частоте. Устройство ом. Обычно относится к фазовой резистентности.
Как на него взглянуть: это влияет на расчет потерь меди, настройку параметров управления цикла тока и оценку повышения температуры. На него значительно влияет температура (повышение температуры)
2. Индуктивность оси / индуктивность оси Q:
Значение: параметр индуктивности статора, определенный в вращающейся системе координат ротора (ось D и ось Q). Ось D находится вдоль направления магнитного поля постоянного магнита, а ось Q составляет 90 градусов электрическим углом впереди оси A.
LD: индуктивность оси D. Из-за присутствия постоянных магнитов магнитное нежелание магнитной схемы оси D является большим, а LD обычно невелик или даже негатив (для встроенных PMSM)
Индуктивность оси Q. Магнитная цепь оси Q в основном проходит через ядра статора и ротора с низким магнитным сопротивлением, а LQ обычно большой. LA:
Ключевые параметры определяют: электромагнитный крутящий момент: t = (3/2) × p [ψ ± × LQ + (LD-LQ) × LD × LQ] (где ψ ± представляет постоянную связь потока магнита). Фундаментальный принцип крутящего момента, генерирующего нежелательный момент, заключается в LD = LQ (для IPMSM с высоким коэффициентом полюса). Слабая магнитная способность: меньшие значения LD обычно обеспечивают более широкие слабые магнитные диапазоны и превосходные высокоскоростные характеристики. Текущая пропускная способность и конструкция контроллера: индуктивность представляет собой первичную постоянную времени в текущем компоненте инерции первого порядка. На электромагнитную форму волны ЭДС и амплитуда значительно влияют уровни магнитного насыщения (особенно при высоких токах).
3. Постоянный поток магнита:
Значение: амплитуда магнитной связи, генерируемой постоянным магнитом в обмотке статора. Подразделение Вебер. Обычно относится к максимальному магнитному звене, вызванному полем постоянного магнита ротора в обмотке статора.
Как смотреть: основные параметры! Он определяет:
Задняя константа ЭМФ: ke = ψpm * w (где w - угловая скорость электрического поля). Задняя ЭДС пропорциональна скорости вращения.
Постоянная крутящего момента: kt ≈ (3/2) * p * ψ ± (для поверхностного spmsm, ld ≈ lq). Крутящий момент пропорционален току оси Q.
Базовая скорость: максимальная скорость, которую двигатель может достичь при номинальном напряжении (когда задний ЭДС находится близко к напряжению шины)
Начальная точка слабых магнитных контролей.
4. Назад Константа ЭМФ:
Определение: величина заднего ЭДС (обычно ссылается на линейную ЭДС), генерируемой на революцию двигателем. Единицы V/(KRPM) или VS/°. Метод измерения: непосредственно связан с сцеплением потока постоянного магнита ψpm (ke = ψpm × w). Используется для оценки обратного ЭДС с любой скоростью вращения (e = ke × n), что имеет решающее значение для определения минимального напряжения шины, необходимого для дисков, предотвращения переодувания и реализации слабого управления магнитом. Измеримый через тестирование без нагрузки.
5. Постоянный крутящий момент:
Значение: величина крутящего момента, генерируемого двигателем на единицу тока (для SPMSM, приблизительно kt ≈ (3/2)*p*ψpm). Устройство NM/A.
Ссылка: используется для оценки команды текущей оси Q, необходимой для данной команды крутящего момента (LQ_REF = T_REF / KT). Обратите внимание, что для IPMSM KT не является постоянной из -за наличия крутящего момента магниторезистентности и варьируется в зависимости от ID.
6. Электрическое время постоянное:
Значение: обычно относится к константе времени электрического времени текущего цикла, T_E = L / R (L обычно принимается как LQ или среднее, R - это сопротивление фазовой
Как смотреть: это ключевой параметр контроллера конструктивного цикла тока (обычно регулятор PI), который определяет скорость отклика текущего цикла.
7. Механическая постоянная времени:
Значение: Учитывая постоянную времени инерции двигателя и нагрузки, трение и другие факторы, TM = J *r/(kt *ke) (J - общая инерция)
Как смотреть: скорость отклика скоростного кольца является важной ссылкой для конструкции контроллера скоростного кольца
8. момент инерции :
Значение: момент инерции самого моторного ротора. Единица Kg · M? Как прочитать: это влияет на способность ускорения/замедления двигателя, динамический отклик цикла скорости и чувствительность к нарушению нагрузки. Сервуатральная система имеет требования для сопоставления момента инерции.
9. Максимальный ток:
Значение: максимальный краткосрочный ток (пиковый ток), разрешенный двигателем или драйвером. Обычно намного больше, чем рейтинг тока.
Как просмотреть: определяет краткосрочную перегрузку (пик крутящего момента) двигателя. Он ограничен такими факторами, как обмоточный нагрев, риск размагничения постоянного магнита и предел тока драйвера.
10. Вращение инерция :
Значение: момент инерции самого моторного ротора. Единица Kg · M?
Как на него взглянуть: это влияет на способность ускорения/замедления двигателя, динамический отклик скоростного кольца и чувствительность к нарушению нагрузки. Сервуатральная система имеет требования к сопоставлению ротационной инерции.
11. Максимальная скорость:
Значение: максимальная скорость, которую двигатель F может достигать в соответствии с требованиями механической прочности, срока службы подшипника, вибрации и шума. Обычно намного выше номинальной скорости.
Как просмотреть: определяет диапазон рабочей скорости двигателя. На самой высокой скорости слабый магнитный контроль обычно требуется для поддержания момента крутящего момента.
Как вы смотрите на эти параметры
1. Четкая цель:
Выбор и сопоставление: сосредоточьтесь на параметрах таблички с фирменной табличкой (мощность, напряжение, скорость, крутящий момент, защита, охлаждение), чтобы обеспечить удовлетворение требований к нагрузке, условий окружающей среды и требований к источнику питания. Сосредоточьтесь на эффективности (долгосрочные эксплуатационные расходы)
Конфигурация и управление приводом: в дополнение к параметрам таблицы таблицы, параметры проектирования (R, LD, LQ, ψpm) должны быть получены в качестве основы для достижения высокопроизводительного векторного управления (например, F0c). Параметры контроллера (усиление PI, или KE/KT) и параметры наблюдателя должны быть установлены в соответствии с этими параметрами.
Анализ производительности и моделирование: полный набор параметров эквивалентных схем (R, LD, LQ, ψpm, Y, коэффициент трения и т. Д.) Требуется для установления точной математической модели.
Диагностика неисправностей. Изменения параметров (такие как повышенная резистентность могут указывать на перегрев обмотки, а изменения индуктивности могут указывать на межтехническое короткое замыкание или размагничивание) могут использоваться в качестве диагностической основы.
2. Обратите внимание на отношения между параметрами:
Мощность, скорость, крутящий момент: p = t*w
Напряжение, обратная эма, ток, индуктивность: v ≈ e + ir + jwli (векторная связь)
Крутящий момент, магнитный поток, ток: t = (3/2)* p* [ψ ±* lq + (ld-lq)* ld* lq] Скорость, частота, логарифм полюса: n_sync = 60f/p заднее силовое силовое
3. Понимание условной природы параметров:
Многие параметры (особенно дизайнерские параметры R, LD и LQ) не являются постоянными - они варьируются в зависимости от температуры, тока (магнитное насыщение) и положение ротора (эффект зубной канавки). Высокопроизводительный контроль должен учитывать эти нелинейные факторы. Технические характеристики на табличках оборудования определяются в определенных условиях (номинальное напряжение, частота, нагрузка, охлаждение и температура). Когда фактические условия работы отличаются от этих идеальных сценариев, производительность может отклоняться от номинальной точки.
4. Посмотрите официальные документы:
Моторные спецификации подробно описаны в таблице оборудования и спецификаций производительности в рамках руководств по руководствам. Критические параметры конструкции (R, LD, LQ, ψpm, KE, KT) обычно приводятся в «технических параметрах», «эквивалентные параметры схемы» или «Параметры управления» руководства. Если недоступна, должна быть получена документация производителей. Подробные параметры, такие как кривые индуктивности на разных уровнях насыщения, могут потребовать специализированных проектных документов или отчетов о испытаниях.
5. ИЗМЕРЕНИЕ ТЕСТО
Если официальные параметры не могут быть получены, требуются экспериментальные измерения (такие как блок-тест, тест перетаскивания без нагрузки, измерение измерения LCR, алгоритм идентификации параметров и т. Д.). Тем не менее, это требует профессионального оборудования и знаний.