








News









































Секрет мгновенного ускорения EVS: внутри логики управления MCU
Электромобили (EV) стали синонимом захватывающего, тихого ускорения. Нажмите на педали, и вы продвигаетесь вперед с чувством непосредственности, что даже производительность газовых автомобилей борются за то, чтобы соответствовать. Но что создает это чувство мгновенной силы? Ответ находится глубоко в электронике транспортного средства, особенно в небольшой, но могучей системе, известной как блок управления двигателем (MCU). Этот блог уводит вас под капюшоном, чтобы исследовать критическую роль логики управления MCU и то, как он переводит намерения водителя в бесшовный крутящий момент и волнующее ускорение.
Почему электромобили чувствуют себя так быстро от остановки?
Если вы когда -либо водили или сидели в электромобиле, то первое, что вы заметите, это то, насколько быстро быстро он ускоряется от нуля. Будь то Tesla Model 3, DOLPHIN BYD или даже компактный городской автомобиль EV, отзывчивость странна. Это «ускорение»-это не просто уловка-это инженерное чудо, возникающее в результате электрических трансмиссий и решений в режиме реального времени MCU автомобиля.
В отличие от автомобилей двигателя внутреннего сгорания (ICE), которые необходимо постепенно наращивать мощность из -за механических задержек и задержек сгорания, EVS мгновенно обеспечивает пиковый крутящий момент. Это присуще электродвигателям, которые не полагаются на сложные сдвиги передач или обороты двигателей, чтобы достичь максимального крутящего момента.
Но необработанные моторные возможности являются лишь частью истории - логика управления MCU гарантирует, что этот крутящий момент доставляется в нужный момент, в нужное количество и без жертвы безопасности или комфорта.

Важность ускорения ощущения в пользовательском опыте
Скорость - это одно - воспринимаемое ускорение - это другое.
Производители EV сегодня конкурируют не только на диапазоне и дизайне, но и за то, насколько гладким, естественным и захватывающим ощущается ускорение. «Чувство» ускорения напрямую влияет:
- Уверенность водителя
- Воспринимаемая производительность транспортного средства
- Восприятие бренда (подумайте о «смешном режиме» Теслы)
- Комфорт пассажиров (резкое ускорение может быть тревожным)
Именно здесь логика управления двигателем играет ключевую роль. MCU адаптирует кривую ускорения на основе данных датчиков, дорожных условий, нагрузки на транспортное средство и даже режима вождения (Eco, Sport, Normal). Результат? Опыт вождения, который является интуитивным и контролируемым.
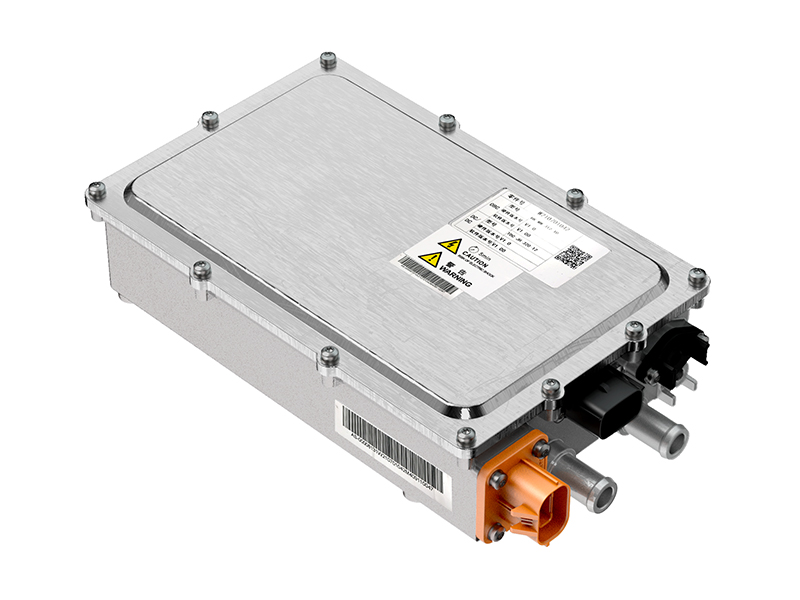
Что такое MCU и что он делает в EV?
Блок управления двигателем (MCU) является цифровым мозгом, ответственным за управление электродвигателем (ы) в EV. Он расположен между педали акселератора и инвертором двигателя и действует как контрольный слой между намерением водителя и электрическим движением.
Ключевые функции MCU:
- Интерпретирует ввод педали ускорителя
- Вычисляет оптимальный выход крутящего момента
- Мониторирует напряжение батареи, температуру и ток
- Управляет скоростью и направлением вращения двигателя
- Координирует регенеративное торможение
- Обеспечивает безопасность системы посредством обнаружения неисправностей
По сути, MCU гарантирует, что электродвигатель ведет себя в соответствии с ожиданиями водителя, условиями транспортных средств и протоколами безопасности-все в режиме реального времени.
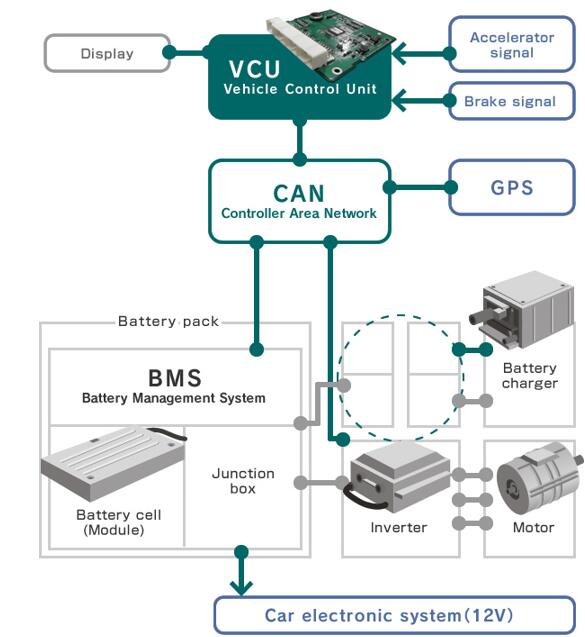
От педали к питанию: перевести ввод драйвера в движение
Давайте рассмотрим типичную цепочку событий:
1.Driver нажимает педали акселератора.
2. Датчик положения педали (часто датчик по залову) посылает сигнал напряжения в MCU.
3. MCU читает этот сигнал и интерпретирует, сколько крутящего момента должен быть доставлен.
4. Это также ссылки:
- Состояние батареи
- Обратная связь управления тягой
- Моторная температура
- Режим вождения
5. MCU отправляет команды в инвертор, который регулирует напряжение и поток тока на электродвигатель.
6. Мотор вращается - и крутящий момент отправляется на колеса.
Весь этот цикл происходит в миллисекундах, благодаря скорости цифровой электроники и мощных встроенных процессоров внутри современных MCU.
Как интерпретируются сигналы ускорения педалей
Вопреки упрощенному предположению, что педаль акселератора похожа на ручку объема, современные электромобили используют сложные методы интерпретации:
Двухканальные педальные сигналы
Для безопасности педаль обычно имеет два избыточных датчика, которые должны договориться о положении педали. АMCUПостоянно проверять их.
Картирование сигнала
MCU не отвечает линейно на положение педали. Он применяет калибровочные кривые на основе режима драйвера. Например:
- Eco Mode: более постепенная доставка крутящего момента
- Нормальный режим: сбалансированный ответ
- Спортивный режим: агрессивная карта крутящего момента с высокой чувствительностью
Адаптивная обратная связь
Некоторые MCU используют машинное обучение или адаптивные алгоритмы для изучения поведения драйвера и скорректировать ответ с течением времени. Это создает уникальный персонализированный опыт вождения.
Ответ крутящего момента: ключ к «мгновенному» ускорению
Определяющей чертой производительности EV является мгновенный крутящий момент, и управление этим является одной из самых важных заданий MCU.
Почему электродвигатели доставляют мгновенный крутящий момент
Электродвигатели генерируют крутящий момент непосредственно из электрического тока и магнитных полей - без ожидания циклов сгорания, клапанов или взаимодействия с передачей. Как только ток протекает через статор, ротор поворачивается.
Роль MCU в контроле крутящего момента
Хотя двигатели могут доставлять полный крутящий момент мгновенно, это не всегда безопасно или эффективно это сделать. MCU тщательно модулирует:
- Скорость доставки крутящего момента (как быстро нарастает крутящий момент)
- Ограничения тяги, чтобы предотвратить скольжение колеса
- Тепловые ограничения для предотвращения перегрева двигателя или батареи
- Оптимизация мощности для эффективности и диапазона
Некоторые системы также имитируют поведение, подобное льду для лучшего знакомства с водителем или комфортом, особенно в гибридных транспортных средствах.

Оптимизация задержки управления в современных MCU
Задержка - задержка между прессом педали и ответом на транспортное средство - является врагом производительности EV. Ведущие бренды EV стремятся к петлям управления на 10 мс, с минимальными джиттерами или вариациями.
Источники задержки:
- Задержка обработки сигналов в датчике педали
- Алгоритмическое время вычисления в MCU
- Задержка связи между MCU и инвертором
- Задержка моторного ответа (минимально)
Методы оптимизации:
- Более быстрые микроконтроллеры с многоядерными процессорами или DSP
- Усовершенствованное планирование для определения приоритетов в реальном времени задач
- Прогнозирующие модели управления, чтобы предвидеть ввод драйвера
- Уменьшенная сложность программного стека
Минимизируя эти задержки, EV предоставляют этот острый ответ, который заставляет ускорение чувствовать себя мгновенным и интуитивным.
Будущее контроля на основе MCU в EVS
Технология MCU продолжает быстро развиваться, чтобы удовлетворить растущие потребности в производительности, безопасности и интеграции искусственного интеллекта.
Тенденции смотреть:
1. Интеграция с ADAS и AI
Future MCU будут интегрироваться с современными системами помощи водителя (ADA), адаптируя авторитетное поведение на основе дорожных условий, обнаружения пешеходов или данных о трафике.
2. Настройка в эфире (OTA)
Подобно тому, как Tesla может повысить ускорение посредством обновлений программного обеспечения, ожидайте, что MCU для поддержки настройки OTA для производительности, эффективности или безопасности даже после продажи.
3. Диагностика, связанная с облаком
MCU будут все чаще сообщать о здоровье моторного здоровья, теплового статуса и схемы использования в облаке для прогнозного обслуживания и удаленной оптимизации.
4. Многократная координация
В AWD и четырехмоторных электромобилях MCU потребуется многоканальная синхронизация, чтобы контролировать векторирование крутящего момента, тяговое и регенеративное торможение.
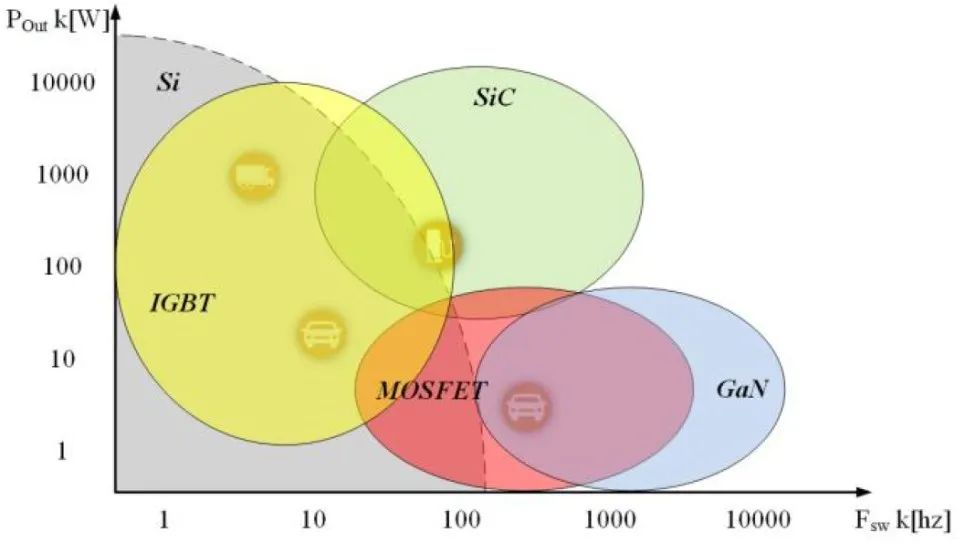
5. Совместимость с карбидом кремния (sic)
В качестве перехода электроники в системы SIC MCU должны поддерживать более высокие частоты переключения, более плотные тепловые конверты и расширенную обработку ошибок.
Заключение
Молническое ускорение электромобилей-это не просто побочный эффект их электродвигателей-это результат тщательного цифрового управления, обрабатываемого блоком управления двигателем (MCU). От интерпретации ввода педали и управления доставкой крутящего момента до минимизации задержек контроля и обеспечения безопасности, MCU является незамеченным героем революции EV.
По мере того, как электромобили продолжают развиваться, роль логики MCU станет еще более критической-смешивая контроль в режиме реального времени с ИИ, облачным подключением и все более сложными архитектурами трансмиссии. В следующий раз, когда вы почувствуете, что волнующий запуск EV, помните: это не только электричество, выполняющее работу - это симфония программного обеспечения, датчиков и кремния, организованного MCU.